史密斯预估补偿控制
基本补偿原理
被控对象含纯滞后环节的闭环传递函数:
注意这里是将被控对象不包含纯滞后的部分作为
造成系统难以控制的本质是特征方程中含有纯滞后环节
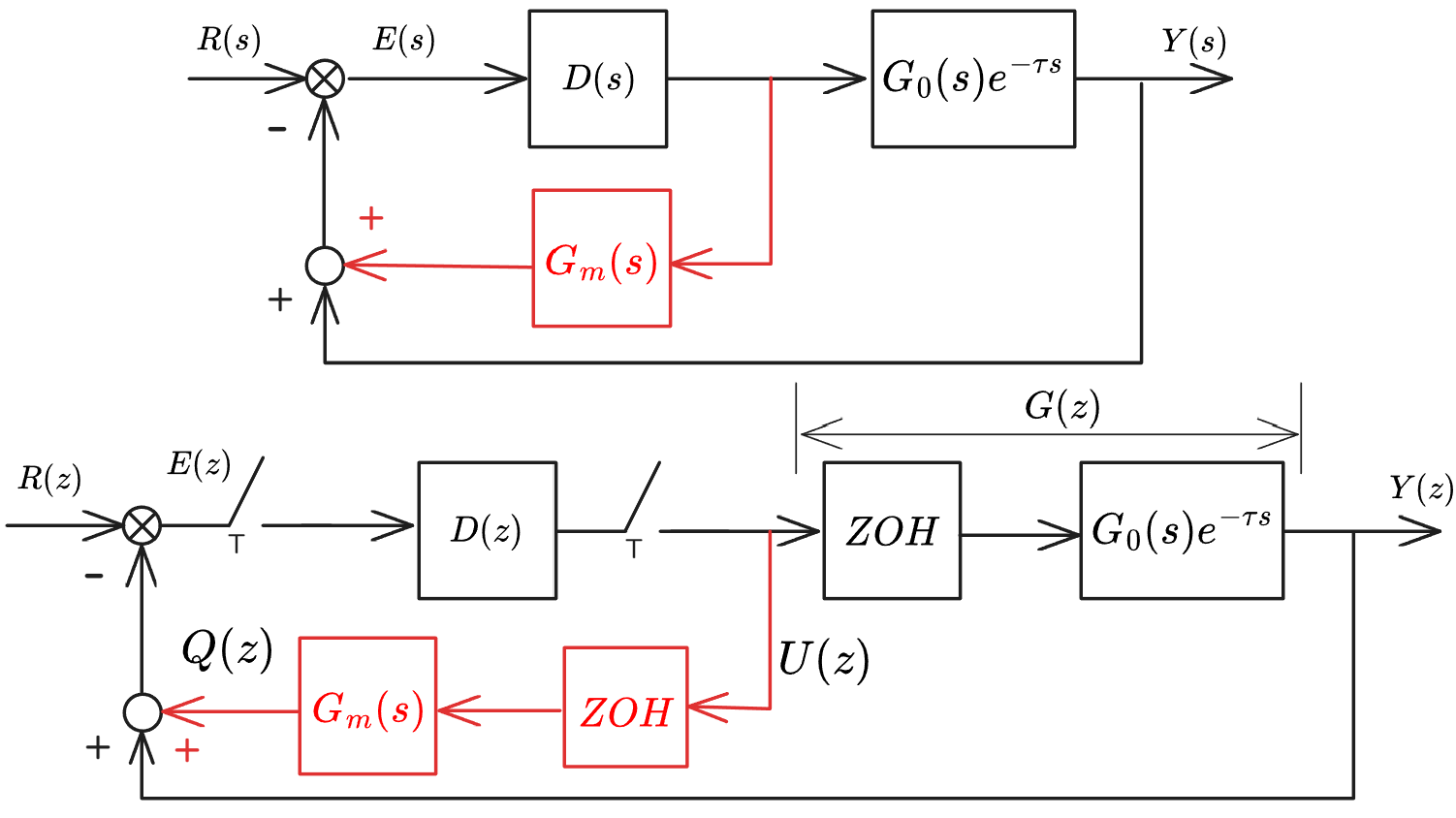
引入与含纯滞后环节的被控对象并联的补偿器,称为史密斯预估补偿器
对补偿器乘以零阶保持器进行离散化
再写为控制算法的形式:
Important
千万要注意题目的表达 ! 不要被符号搞混了
要注意给的被控对象可能直接写为
被控对象含纯滞后环节的闭环传递函数:
注意这里是将被控对象不包含纯滞后的部分作为
造成系统难以控制的本质是特征方程中含有纯滞后环节
引入与含纯滞后环节的被控对象并联的补偿器,称为史密斯预估补偿器
对补偿器乘以零阶保持器进行离散化
再写为控制算法的形式:
千万要注意题目的表达 ! 不要被符号搞混了
要注意给的被控对象可能直接写为